We are in the process of curating a list of this year’s publications — including links to social media, lab websites, and supplemental material. Currently, we have 65 full papers, 22 LBWs, three Journal papers, one alt.chi paper, two SIG, two Case Studies, one Interactivity, one Student Game Competition, and we lead two workshops. 13 papers received an honorable mention.
Disclaimer: This list is not complete yet; the DOIs might not be working yet.
Your publication from 2025 is missing? Please enter the details in this Google Forms and send us an email that you added a publication: contact@germanhci.de
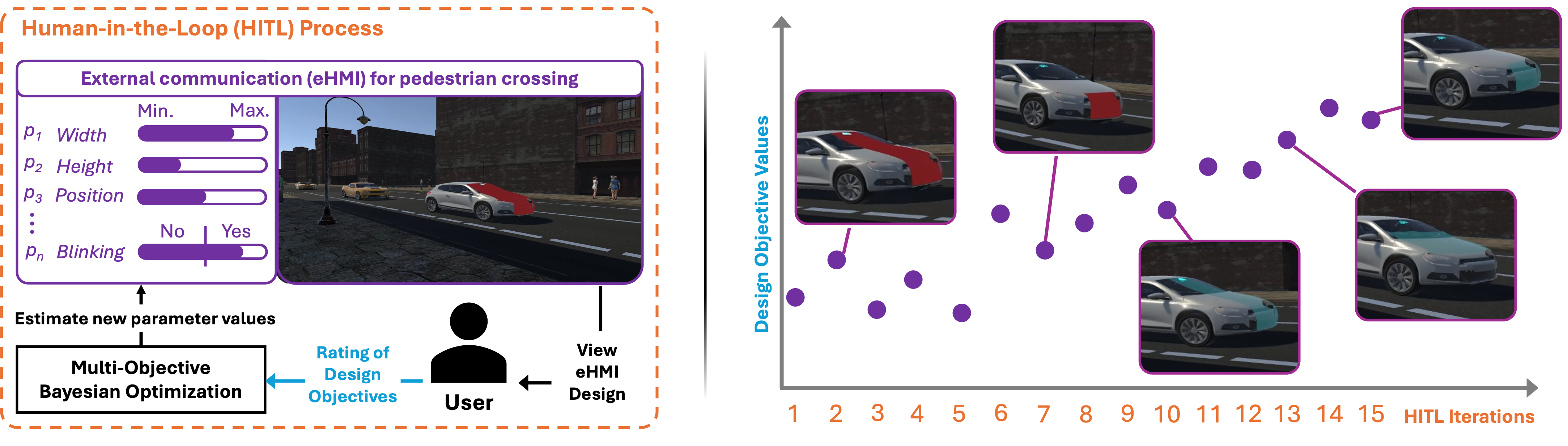
Improving External Communication of Automated Vehicles Using Bayesian Optimization
Mark Colley (Ulm University, UCL), Pascal Jansen (Ulm University), Mugdha Keskar (Ulm University), Enrico Rukzio (Ulm University)
Abstract | Tags: Automotive, Full Paper | Links:
@inproceedings{Colley2025ImprovingExternal,
title = {Improving External Communication of Automated Vehicles Using Bayesian Optimization},
author = {Mark Colley (Ulm University, UCL), Pascal Jansen (Ulm University), Mugdha Keskar (Ulm University), Enrico Rukzio (Ulm University)},
url = {https://www.uni-ulm.de/en/in/mi/hci/, website
https://youtu.be/bKW-xmrZ_RE, teaser video
https://www.linkedin.com/in/mark-colley-6a50ab111/, linkedin},
doi = {10.1145/3706598.3714187},
year = {2025},
date = {2025-04-26},
urldate = {2025-04-26},
abstract = {The absence of a human operator in automated vehicles (AVs) may require external Human-Machine Interfaces (eHMIs) to facilitate communication with other road users in uncertain scenarios, for example, regarding the right of way. Given the plethora of adjustable parameters, balancing visual and auditory elements is crucial for effective communication with other road users. With N=37 participants, this study employed multi-objective Bayesian optimization to enhance eHMI designs and improve trust, safety perception, and mental demand. By reporting the Pareto front, we identify optimal design trade-offs. This research contributes to the ongoing standardization efforts of eHMIs, supporting broader adoption.},
keywords = {Automotive, Full Paper},
pubstate = {published},
tppubtype = {inproceedings}
}
Introducing ROADS: A Systematic Comparison of Remote Control Interaction Concepts for Automated Vehicles at Road Works
Mark Colley (Ulm University, Germany, UCL Interaction Centre, UK), Jonathan Westhauser (Ulm University, Germany), Jonas Andersson(RISE Research Institutes of Sweden), Alexander G. Mirnig (Department of Artificial Intelligence, Human Interfaces, University of Salzburg, Center for Technology Experience, AIT Austrian Institute of Technology), Enrico Rukzio (Ulm University, Germany)
Abstract | Tags: Automotive, Full Paper | Links:
@inproceedings{Colley2025IntroducingRoads,
title = {Introducing ROADS: A Systematic Comparison of Remote Control Interaction Concepts for Automated Vehicles at Road Works},
author = {Mark Colley (Ulm University, Germany and UCL Interaction Centre, UK), Jonathan Westhauser (Ulm University, Germany), Jonas Andersson(RISE Research Institutes of Sweden), Alexander G. Mirnig (Department of Artificial Intelligence and Human Interfaces, University of Salzburg and Center for Technology Experience, AIT Austrian Institute of Technology), Enrico Rukzio (Ulm University, Germany)},
doi = {10.1145/3706598.3713476},
year = {2025},
date = {2025-04-26},
urldate = {2025-04-26},
abstract = {As vehicle automation technology continues to mature, there is a necessity for robust remote monitoring and intervention features. These are essential for intervening during vehicle malfunctions, challenging road conditions, or in areas that are difficult to navigate. This evolution in the role of the human operator—from a constant driver to an intermittent teleoperator—necessitates the development of suitable interaction interfaces. While some interfaces were suggested, a comparative study is missing. We designed, implemented, and evaluated three interaction concepts (path planning, trajectory guidance, and waypoint guidance) with up to four concurrent requests of automated vehicles in a within-subjects study with N=23 participants. The results showed a clear preference for the path planning concept. It also led to the highest usability but lower satisfaction. With trajectory guidance, the fewest requests were resolved. The study's findings contribute to the ongoing development of HMIs focused on the remote assistance of automated vehicles.},
keywords = {Automotive, Full Paper},
pubstate = {published},
tppubtype = {inproceedings}
}
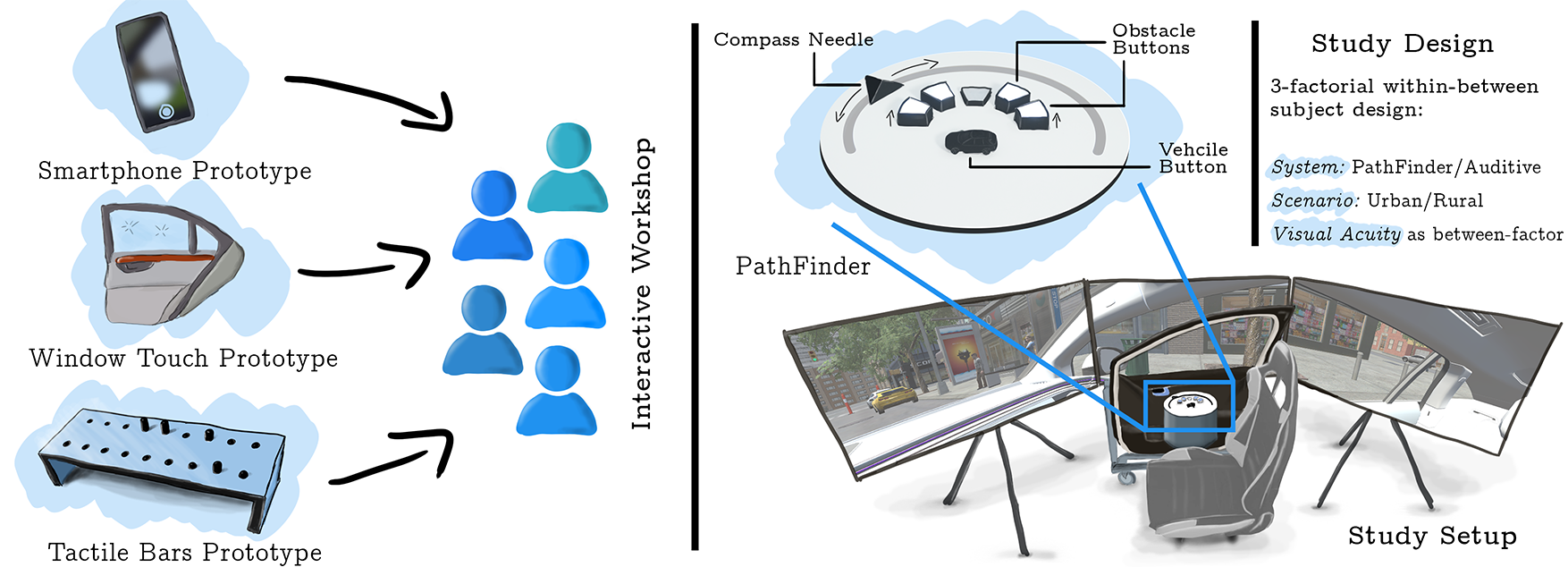
Light My Way. Developing and Exploring a Multimodal Interface to Assist People With Visual Impairments to Exit Highly Automated Vehicles
Luca-Maxim Meinhardt (Ulm University), Lina Madlin Weilke (Ulm University), Maryam Elhaidary (Ulm University), Julia von Abel (Ulm University), Paul D. S. Fink (VEMI Lab, The University of Maine), Michael Rietzler (Ulm University), Mark Colley (Ulm University, UCL), Enrico Rukzio (Ulm University)
Abstract | Tags: Automotive, Full Paper | Links:
@inproceedings{Meinhardt2025LightWay,
title = {Light My Way. Developing and Exploring a Multimodal Interface to Assist People With Visual Impairments to Exit Highly Automated Vehicles},
author = {Luca-Maxim Meinhardt (Ulm University), Lina Madlin Weilke (Ulm University), Maryam Elhaidary (Ulm University), Julia von Abel (Ulm University), Paul D. S. Fink (VEMI Lab, The University of Maine), Michael Rietzler (Ulm University), Mark Colley (Ulm University, UCL), Enrico Rukzio (Ulm University)},
url = {https://www.uni-ulm.de/en/in/mi/hci/, website
https://www.youtube.com/watch?v=-we2VJLCYgs&ab_channel=Luca-MaximMeinhardt, teaser video
https://www.linkedin.com/in/luca-maximmeinhardt/, linkedin},
doi = {10.1145/3706598.3713454},
year = {2025},
date = {2025-04-26},
urldate = {2025-04-26},
abstract = {The introduction of Highly Automated Vehicles (HAVs) has the potential to increase the independence of blind and visually impaired people (BVIPs). However, ensuring safety and situation awareness when exiting these vehicles in unfamiliar environments remains challenging. To address this, we conducted an interactive workshop with N=5 BVIPs to identify their information needs when exiting an HAV and evaluated three prior-developed low-fidelity prototypes. The insights from this workshop guided the development of PathFinder, a multimodal interface combining visual, auditory, and tactile modalities tailored to BVIP's unique needs. In a three-factorial within-between-subject study with N=16 BVIPs, we evaluated PathFinder against an auditory-only baseline in urban and rural scenarios. PathFinder significantly reduced mental demand and maintained high perceived safety in both scenarios, while the auditory baseline led to lower perceived safety in the urban scenario compared to the rural one. Qualitative feedback further supported PathFinder's effectiveness in providing spatial orientation during exiting.},
keywords = {Automotive, Full Paper},
pubstate = {published},
tppubtype = {inproceedings}
}
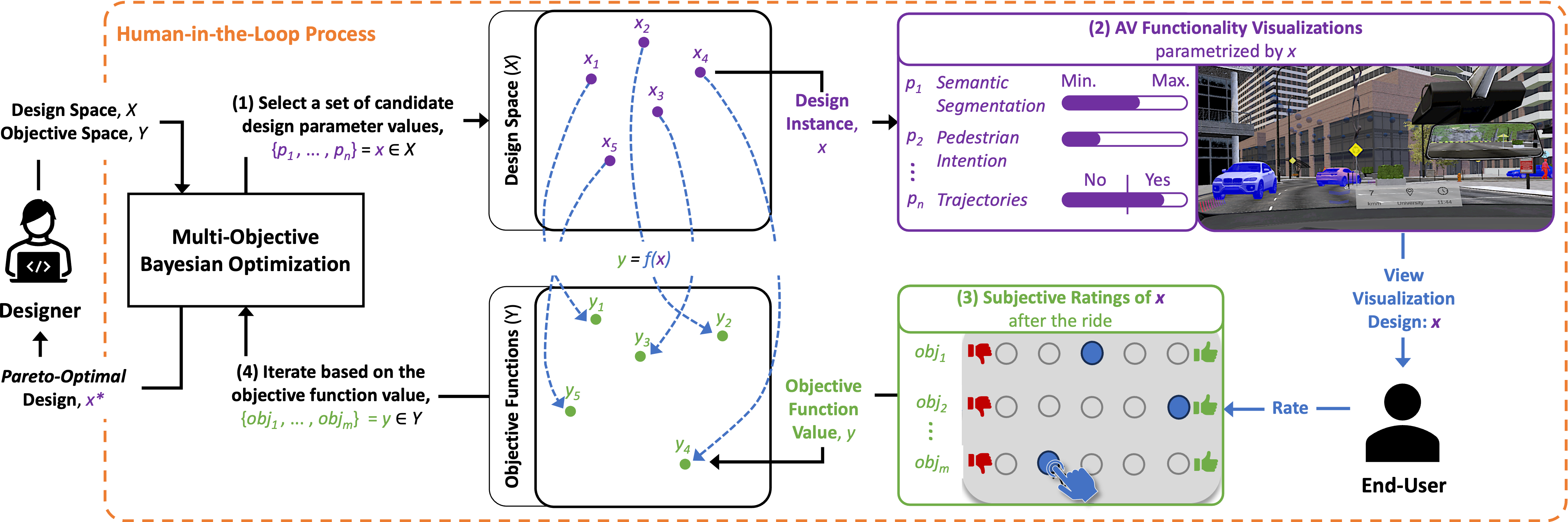
OptiCarVis: Improving Automated Vehicle Functionality Visualizations Using Bayesian Optimization to Enhance User Experience
Pascal Jansen (Ulm University), Mark Colley (Ulm University, Cornell Tech), Svenja Krauß (Ulm University), Daniel Hirschle (Ulm University), E. Rukzio (Ulm University)
Honorable MentionAbstract | Tags: Automotive, Full Paper, Honorable Mention | Links:
@inproceedings{Jansen2025Opticarvis,
title = {OptiCarVis: Improving Automated Vehicle Functionality Visualizations Using Bayesian Optimization to Enhance User Experience},
author = {Pascal Jansen (Ulm University), Mark Colley (Ulm University, Cornell Tech), Svenja Krauß (Ulm University), Daniel Hirschle (Ulm University) and E. Rukzio (Ulm University)},
url = {https://www.uni-ulm.de/en/in/mi/hci/, website
https://youtu.be/n6O_DOkw-Ng, teaser video
https://www.linkedin.com/in/pascal-jansen-/, linkedin},
doi = {10.1145/3706598.3713514},
year = {2025},
date = {2025-04-26},
urldate = {2025-04-26},
abstract = {Automated vehicle (AV) acceptance relies on their understanding via feedback. While visualizations aim to enhance user understanding of AV’s detection, prediction, and planning functionalities, establishing an optimal design is challenging. Traditional "one-size-fits-all" designs might be unsuitable, stemming from resource-intensive empirical evaluations. This paper introduces OptiCarVis, a set of Human-in-the-Loop (HITL) approaches using Multi-Objective Bayesian Optimization (MOBO) to optimize AV feedback visualizations. We compare conditions using eight expert and usercustomized designs for a Warm-Start HITL MOBO. An online study (N=117) demonstrates OptiCarVis’s efficacy in significantly improving trust, acceptance, perceived safety, and predictability without increasing cognitive load. OptiCarVis facilitates a comprehensive design space exploration, enhancing in-vehicle interfaces for optimal passenger experiences and broader applicability.},
keywords = {Automotive, Full Paper, Honorable Mention},
pubstate = {published},
tppubtype = {inproceedings}
}